Portfolio Overview
RC GIPPS Car Following Model
By George Yazji
Learn More
About This Project
Developed a GIPPS car-following model simulation for autonomous vehicle behavior using RC cars.
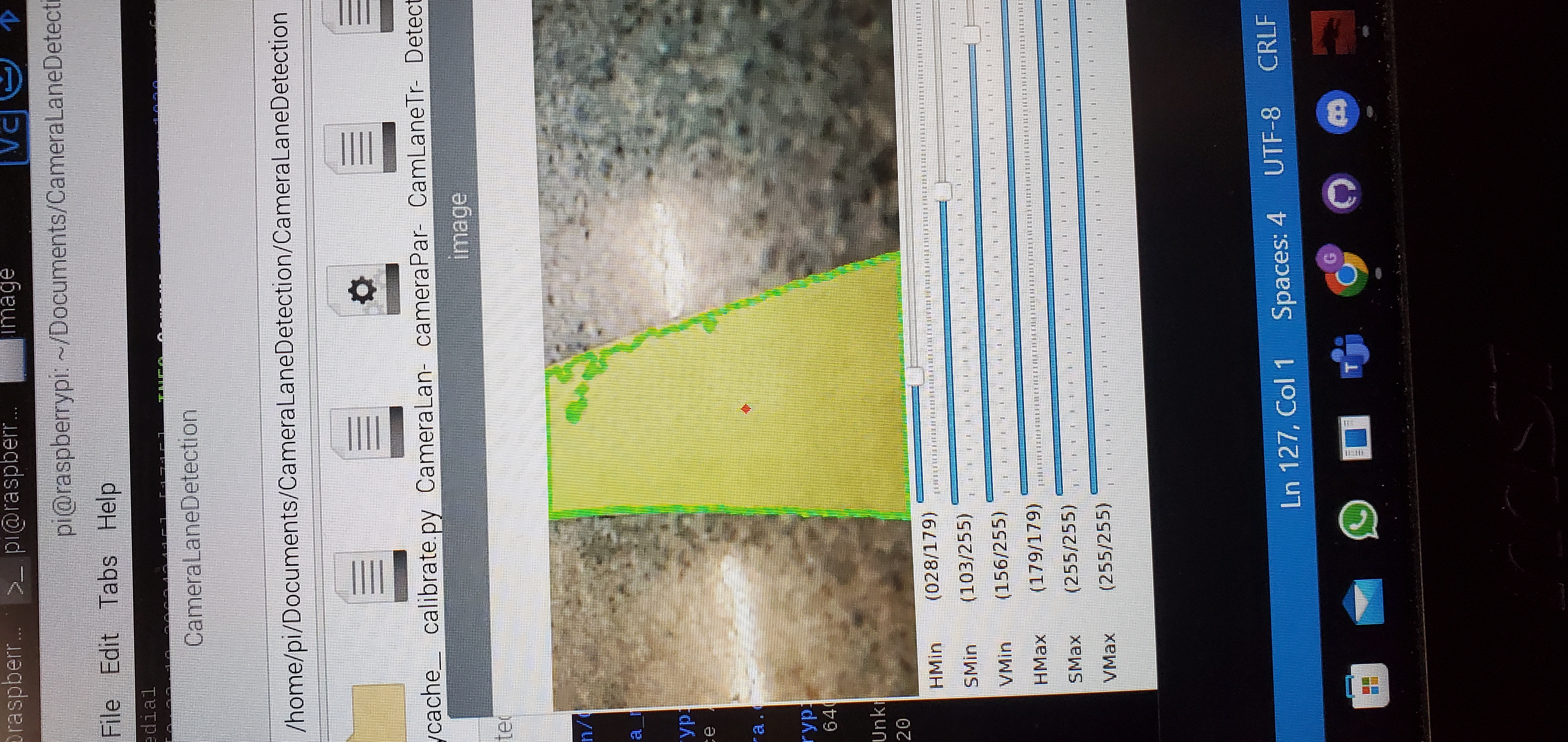
Designed a PID controller for RC cars to follow pre-set paths using real-time camera feed processing with OpenCV.
Implemented communication protocol for the interaction of the RC cars using MQTT messaging protocol.
Simulated a traffic manager to coordinate intersection traffic flow with intersections, enhancing vehicle navigation.
View Project on GitHub
Project Media
GIPPS Model Video
Path Finding Simulation
Traffic Lights Simulation
GIPPS Demo Attempt
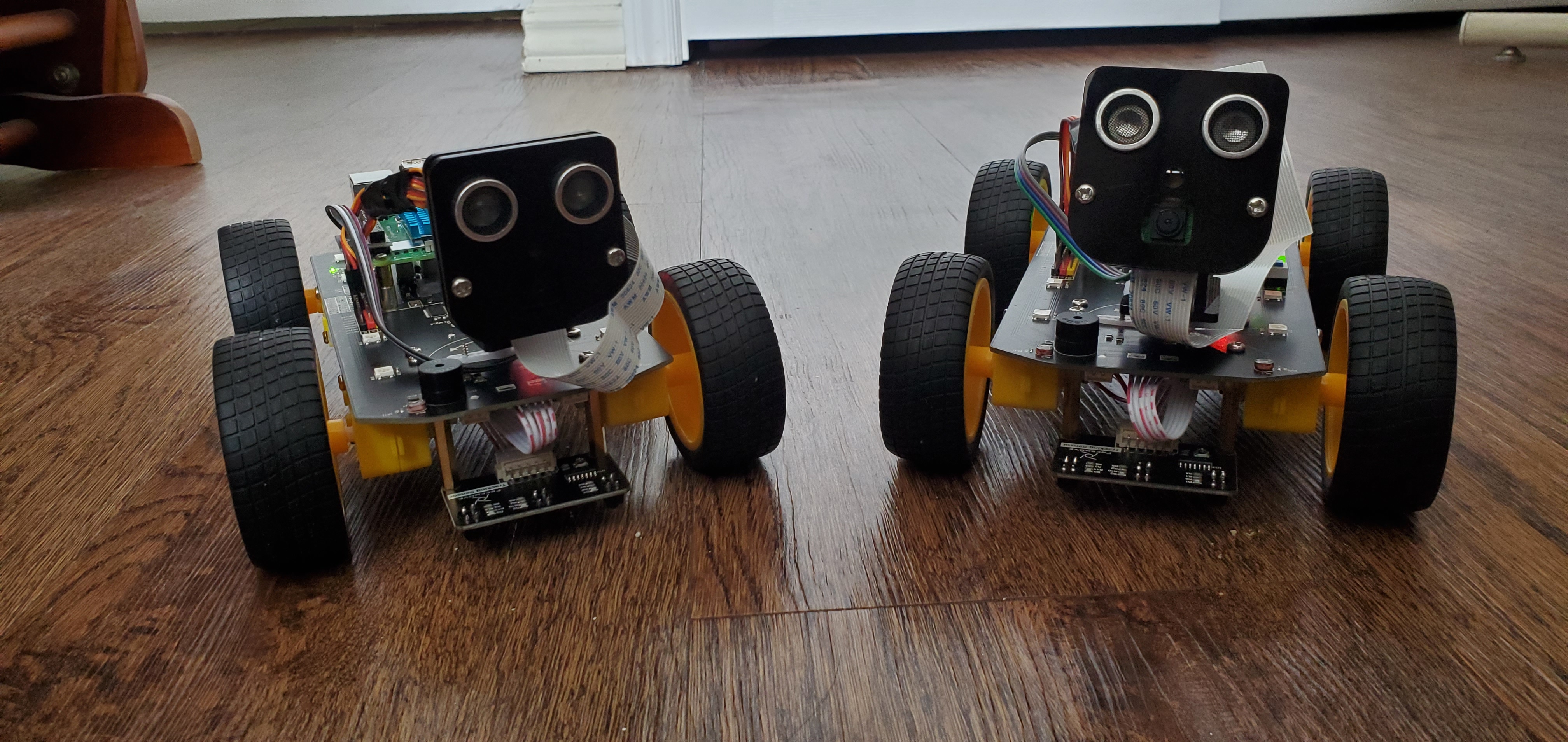
Initial Setup
RC Cars in Action
Traffic Intersection Setup